ILLIXR Services
This page details the structure of ILLIXR's services and how they interact with each other.
fauxpose
An alternate tracking implementation that simply generates "fast_pose" data from a simple mathematical algorithm (circular movement). The intent is for use when debugging other plugins and the developer wants a known pose trajectory without having to configure actual tracking.
Topic details:
- Provides fast_pose_type
- Asynchronously reads time_type from vsync_estimate topic.
pose_prediction
Uses the latest IMU value to predict a pose for a future point in time.
Implements the pose_prediction service,
so poses can be served directly to other plugins.
Topic details:
- Asynchronously reads
pose_typeonslow_posetopic, but it is only used as a fallback. - Asynchronously reads
imu_rawonimu_rawtopic. - Asynchronously reads
pose_typeontrue_posetopic, but it is only used if the client asks for the true pose. - Asynchronously reads
time_typeonvsync_estimatetopic. This tellspose_predictwhat time to estimate for.
Details Code
pose_lookup
Implements the pose_predict service, but uses ground truth from the dataset.
The plugin peeks "into the future" to determine what the exact pose will be at a certain time.
Topic details:
- Asynchronously reads
time_pointonvsync_estimatetopic. This tellspose_lookupwhat time to lookup.
Details Code
vkdemo
INFO NEEDED
Topic details:
- Calls
pose_prediction - Calls
vulkan::display_provider
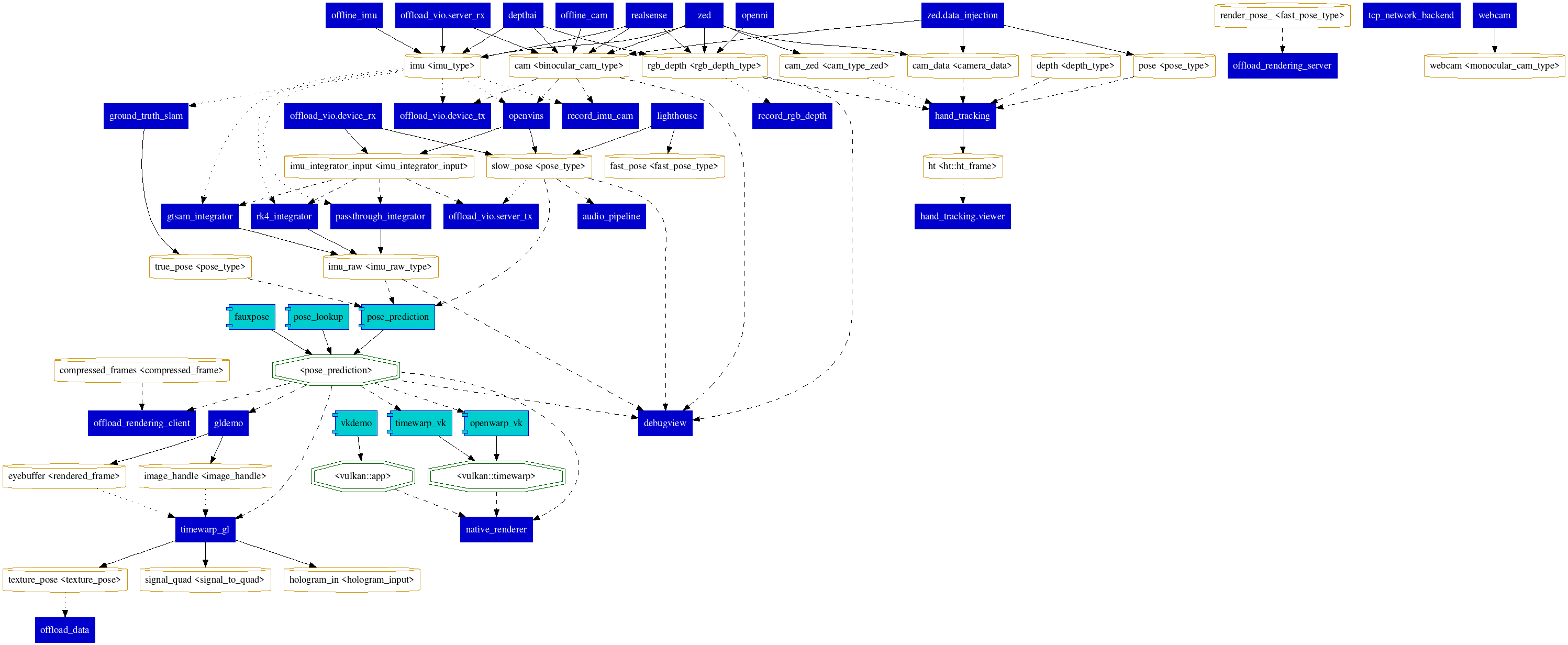 Current dataflow between all plugins and services. Dark blue boxes represent plugins and cyan component boxes represent services. Data types are represented with cylinders and labelled as
Current dataflow between all plugins and services. Dark blue boxes represent plugins and cyan component boxes represent services. Data types are represented with cylinders and labelled as topic <data_type>. Service data types are represented by octagons. Solid lines point from the plugin/service which publishes them to the data type. Dashed lines point from data types to the plugin/service which reads them synchronously. Dotted lines point from data types to the plugin/service which reads them asynchronously.